(!)由於 Microsoft 2022 年 6 月 15 日終止支援,Internet Explorer 11 不屬於本網站之推薦環境。

商品分類
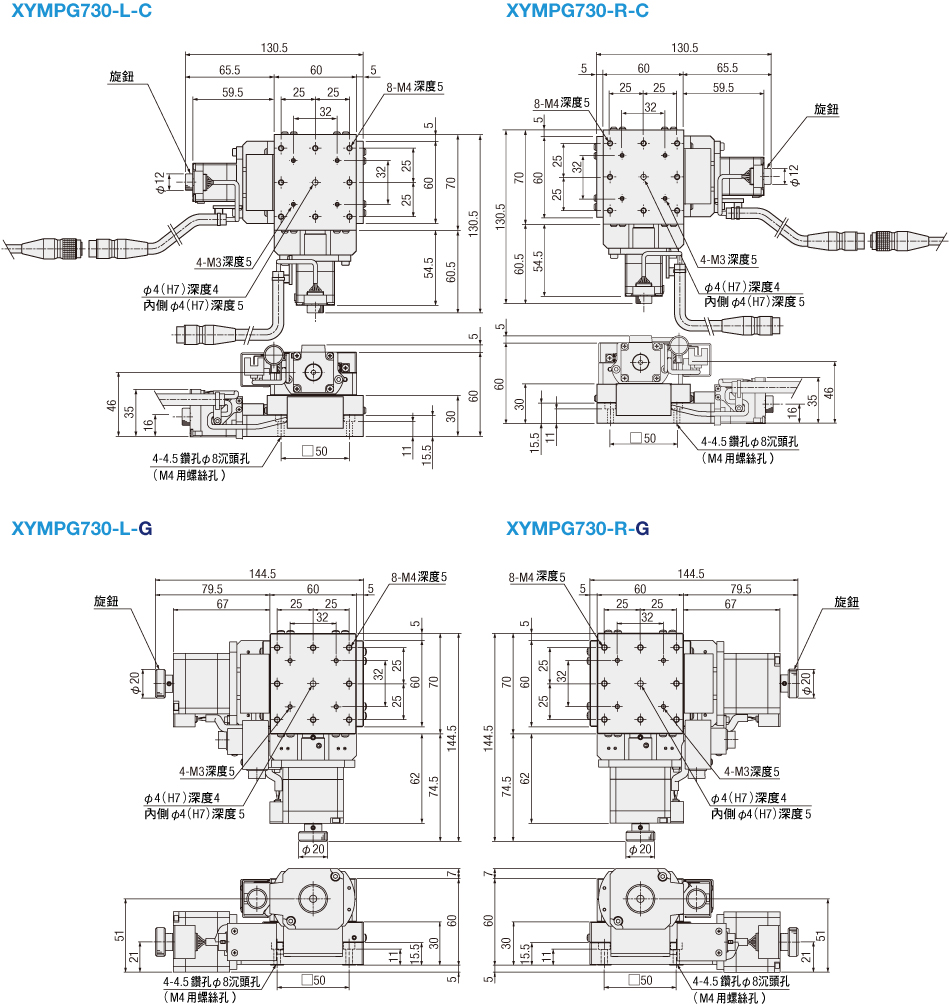
【自動】XY軸交叉滾子式 行程30



XY axis cross roller
(i)請注意
- 伴隨□38mm步進馬達的生產終止,一部分滑台的馬達式樣有變更。
對象TYPE與變化點請參照自動滑台□38mm步進馬達的規格廢止與替代品相關。
現行品規格廢止:2020年12月31日止(當日訂單仍可以對應)
替代品販售時間:2020年4月24日開始 - 3D預覽未提供新型號之範例,詳細尺寸請參考商品PDF。
材 質 鋁合金
表面處理 黑色陽極處理
附屬品 SCB4−16 4pcs
表面處理 黑色陽極處理
附屬品 SCB4−16 4pcs
規格表
| 型式 | − | 感應器 | − | 馬達 | − | 纜線 |
| XYMPG730 XYMPG730 | − − | L R | − − | C G | − − | N N |
| 型式 | 感應器 | 馬達 | 纜線 | 機械規格 | 精密度規格*1 | |||||
| Type | No. | 護蓋位置 | 滑台台面 (mm) | 移動量 (mm) | 本體重量 (kg) | 單向定位精度 (單軸時) | 俯仰 | 橫擺 | ||
| XYMPG | 730 | L (正方向) R (反方向) | C (標準) | N (無纜線、另售) | 60×70 | 30 | 1.1 | 5μm以內 | 25'' | 20'' |
| G (高解析度) | 1.5 | |||||||||
3D預覽型號
尚未指定完整型號,因此無法執行CAD檔案下載及3D預覽
- ※ 欲執行CAD檔案下載及3D預覽時,需指定完整型號。
- 請於左側「篩選規格・尺寸」確認完整型號,然後執行CAD檔案下載及3D預覽。
Loading...
| 型號 |
|---|
| XYMPG730-L-C-N |
| XYMPG730-L-G-N |
| XYMPG730-R-C-N |
| XYMPG730-R-G-N |
| 型號 | 數量折扣 | 標準 出貨日 | 馬達・馬達特性 | 解析度 (μm) | 最高速度 (mm/sec) | 感應器選擇 |
|---|---|---|---|---|---|---|
| 11天~ | 5相步進馬達 | 2μm | 20 | L | ||
| 11天~ | 5相步進馬達高分解能 | 1μm | 10 ~ 20 | L | ||
| 11天~ | 5相步進馬達 | 2μm | 20 | R | ||
| 11天~ | 5相步進馬達高分解能 | 1μm | 10 ~ 20 | R |
Loading...
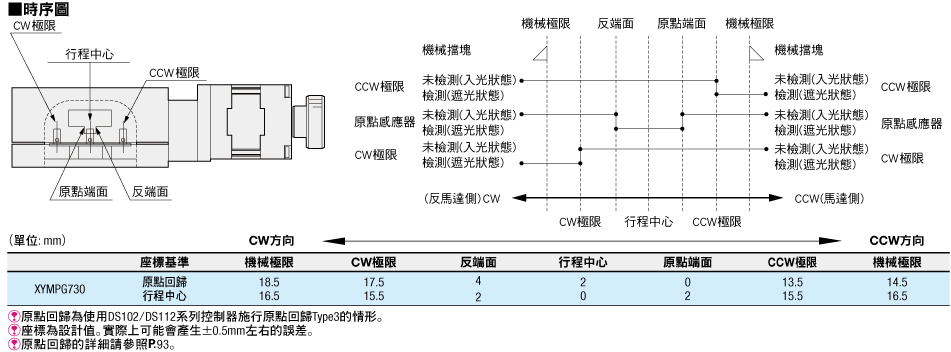
規格概要
■共通規格
為單軸(平放時)的樣式。
*2 指對於一個脈衝信號的滑台移動量。
*3 ( )內為選擇馬達選購品G(高解析度)的數值。
*4 耐荷重為XY軸(2軸式)的數值。
| 進給螺桿 | 滾珠螺桿φ8、導程1 | |
| 導引 | 交叉滾子滑軌 | |
| 解析度*2 | Full | 2μm(1μm)*3 |
| Half | 1μm(0.5μm)*3 | |
| 微動(1/20分割) | 0.05μm | |
| 最高速度 | 20㎜/sec(10mm/sec)*3 | |
| 反覆定位精密度 | ±0.3μm以內 | |
| 耐荷重*4 | 44.1N | |
| 空轉 | 1μm以內 | |
| 背隙 | 0.5μm以內 | |
| 真直度 | 3μm以內 | |
| 平行度 | 30μm以內 | |
| 運動平行度 | 10μm以內 | |
*2 指對於一個脈衝信號的滑台移動量。
*3 ( )內為選擇馬達選購品G(高解析度)的數值。
*4 耐荷重為XY軸(2軸式)的數值。
■電氣規格
| 型式 | C | G | |
| 標準 | 高解析度 | ||
| 馬達 | 類型 | 5相步進馬達 0.75A/相(東方馬達) | |
| 型式 | PMM33BH2-C16-1(□28mm) | PK544PMB-C18(□42mm) | |
| 步進角度 | 0.72° | 0.36° | |
| 驅動器型式 | − | ||
| 連接器 | 型式 | HR10A-10R-12P(73)(廣瀨電機(株)) | |
| 受側適用連接器 | HR10A-10P-12S(73)(廣瀨電機(株)) | ||
| 連接器型式 | − | ||
| 受側適用連接器型式 | − | ||
| 感應器 | 極限感應器 | 有 | |
| 開縫原點感應器 | − | ||
| 原點感應器 | 有 | ||
| 型式 | 微形光電感應器:PM-L25 Panasonic Device SUNX(株) | ||
| 電源電壓 | DC5~24V以下 ±10% | ||
| 消耗電流 | 45mA以下(每1個感應器 15mA以下) | ||
| 控制輸出 | NPN開集極輸出 DC30V以下50mA以下 殘留電壓0.7V以下(負荷電流50mA時) 殘留電壓0.4V以下(負荷電流16mA時) | ||
| 輸出邏輯 | 檢測時(遮光):輸出電晶體OFF(非導通) | ||
基本資訊
| 型式 | 自動XY軸滑台 | 材質 | 鋁合金 | 滑軌 | 交叉滾子 |
|---|---|---|---|---|---|
| 滑座進給方式 | 滾珠螺桿 | 滑座長度(mm) | 70 | 滑座寬度(mm) | 60 |
| 行程(X距離)(mm) | 30 | 行程(Y距離)(mm) | 30 | 表面處理 | 黑色陽極處理 |
| 穿透孔(滑座中心孔) | 無 | 耐荷重(範圍)(N) | 30.1~50 | 耐荷重(N) | 44.1 |
| 定位精密度(μm) | 5 | 滑座真直度(μm) | 3 | 感應器 | 限度+原點 |
| 傳輸線 | 無纜線 | 導程 | 1 |
- 因有部分型號的規格・尺寸無法完全顯示,詳細資訊請參照 廠牌產品型錄 。
此分類還有這些商品
- 【自動】XY軸 線性鋼珠
- 【自動】X軸 線性鋼珠導軌
- 【自動】XY軸 線性鋼珠
- 【自動】XY軸交叉滾子式
- 【自動】Z軸交叉滾子式
- 【中精密度】自動X軸 線性鋼珠導軌
- 【自動】XY軸 線性鋼珠 -行程30~75-
- 【經濟型】自動滑台 XY軸
經常被一起購買的商品




看過此商品的人也看過這些商品












技術支援服務
- FA用機械標準零件
- Tel:02-25703766 / FAX:02-25703767
- 與我們聯絡
請協助改善本網站
請協助改善本網站
對於各位顧客的寶貴意見請恕我們無法逐一回覆,還請諒解。
個人資訊保護法・隱私權政策
非常感謝您的回答。
對於各位顧客的寶貴意見請恕我們無法逐一回覆,還請諒解。
希望三住回覆的客戶請使用、 與我們聯絡
個人資訊保護法・隱私權政策